GNSS/惯性/视觉/激光雷达多源信息智能融合高精度自主定位
时间:2020-05-30
作者:张小红,朱锋
点击:次
基于Apollo小车平台,集成了多频多系统GNSS、战术级惯导、工业级里程计、高分辨率双目彩色相机、多线激光雷达等传感器,经过严格的硬件同步后将多源数据送入高性能中央处理器TITAN,同时接入高精度GNSS差分信息与高精度地图资源,在TITAN内部完成多源信息智能融合处理,实现自动驾驶高精度自主定位,并将该重要信息输入到环境感知与决策控制模块,最终由TITAN控制小车完成自动驾驶。

图1 自动驾驶多源信息智能融合平台
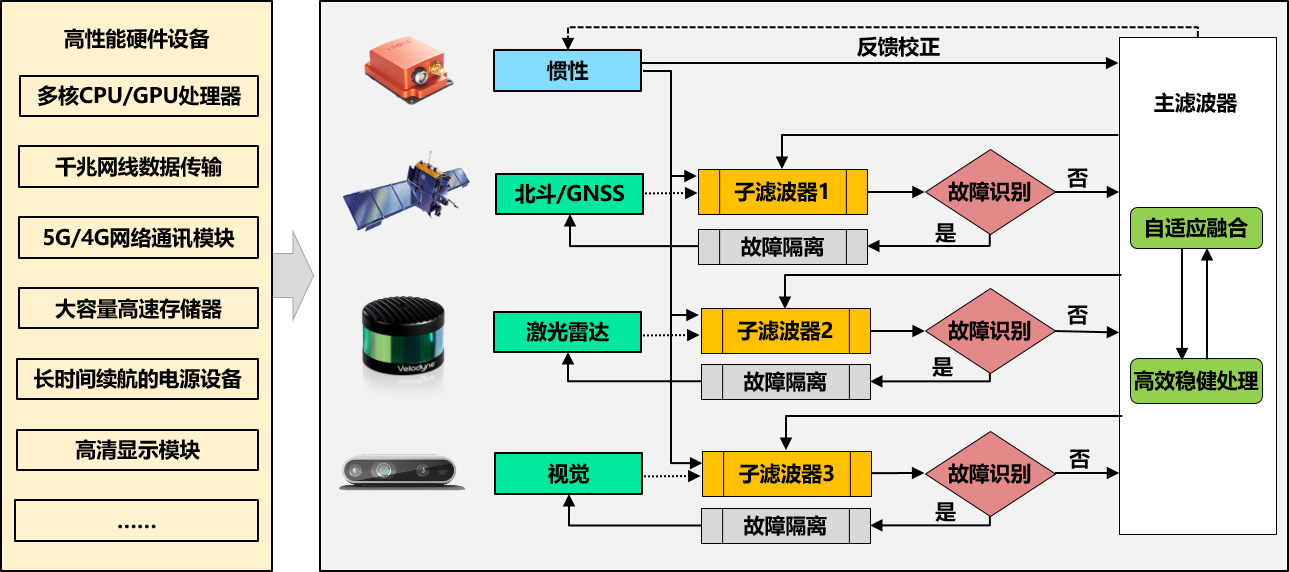
图2 GNSS/惯性/视觉/激光雷达多源融合高精度自主定位技术架构

图3 武汉大学信息学部校区自动驾驶自主定位演示
- 上一篇:精密单点定位理论方法及其应用
- 下一篇:精密定位定姿技术方法与软件系统